A class of objects such as a vehicle vary so much in color. Structural cues like shape give a more robust representation. Gradients of specific directions captures some notion of shape. To allow for some variability in shape, we’ll use features known as Histogram of Oriented Gradients (HOG).
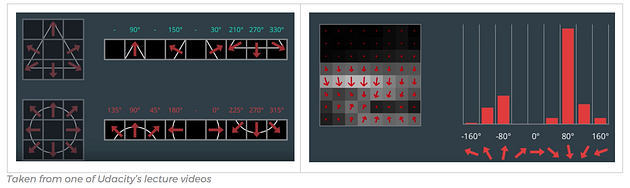
The idea of HOG is instead of using each individual gradient direction of each individual pixel of an image, we group the pixels into small cells. For each cell, we compute all the gradient directions and group them into a number of orientation bins. We sum up the gradient magnitude in each sample. So stronger gradients contribute more weight to their bins, and effects of small random orientations due to noise is reduced. This histogram gives us a picture of the dominant orientation of that cell. Doing this for all cells gives us a representation of the structure of the image. The HOG features keep the representation of an object distinct but also allow for some variations in shape.